![]()
Foxglove Studio is an open-source tool specially made for robot visualization and debugging. In our laboratory, we use it to help us visualize and get valuable info as far as concerning data, statistics, and bugs related to our Duckiebots.
Install & Use
The Foxglove Studio works with macOS, Windows, and Linux.
You can either install it natively to your computer by downloading the Desktop App or use the Open web app online.
You can download the Foxglove Studio app through the following link: Download – Foxglove
You can use the Open web app through the following link: Foxglove Studio
Purpose – Usage
Each duckiebot has its own dashboard which you can access once the robot is connected to the same network as your laptop through the following link:
http://YOUR_DUCKIEBOT_NAME.local/
Through that dashboard, we can get plenty of valuable information concerning our robot. For example, camera view, speed, battery, ROS architecture, etc. are just a few of them.
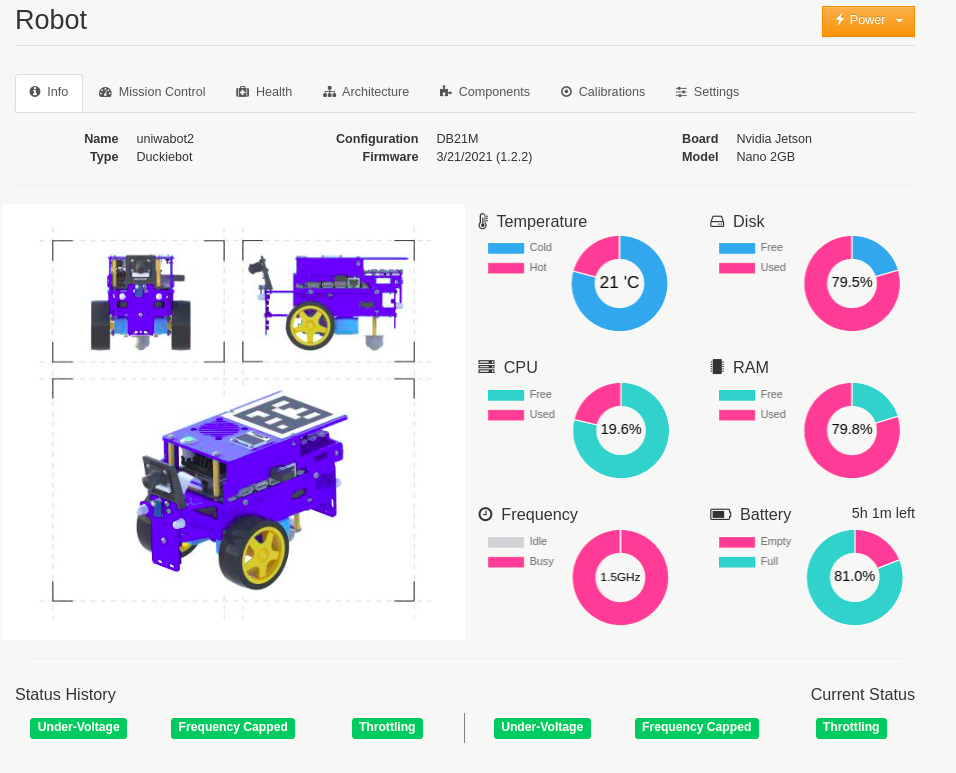
Although using the Foxglove Studio, we can have all that and plenty more info at the same time. Also, a big pro of the Foxglove Studio is the ability to customize all the info you want and use it as you wish. For example, you can export as a CSV file the metrics of the ToF sensor.
In our case, the panels that we are using with our robots are the following:
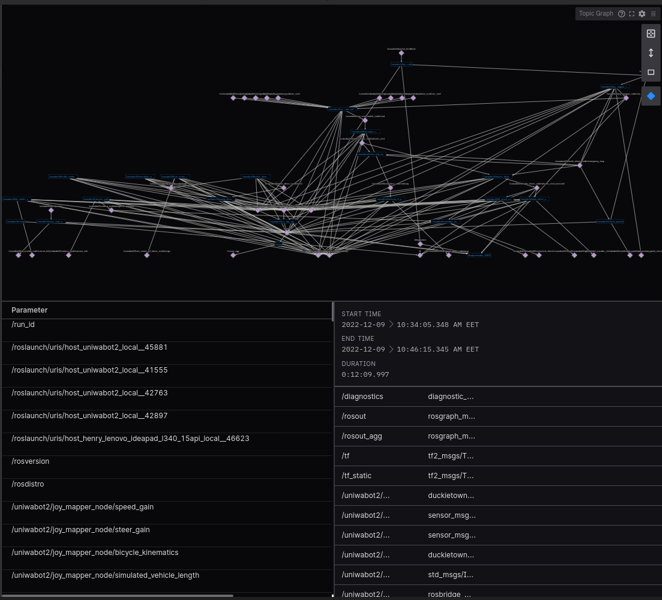
– Data Source Info
Using this panel we can see the duration of the robot’s data source. Furthermore using it we can also view the incoming topic of the Duckiebot.
– Diagnostics-Summary
Using this panel, we can control the status of the seen node in a running feed. The status of them can be seen as OK, Warn, Error or Stale.
– Image
With this panel, we can see what our Duckiebot sees with its “eye” (camera).
– Parameters
This panel can be used to help us see all the current rosparam. Using it we can read and set all the parameters of the connected data source of the robot.
– Plot
This panel helps us see the arbitrary values from the topic message paths.
– Log
This panel displays all the log messages from the topics the robot is running.
– Topic Graph
This panel shows us all the ROS nodes and topics as well as the way they are connected.
The Foxglove Studio is a very useful robotics tool that can be used for simple robots, like Duckiebot which has a few sensors, to more sophisticated and complex robot architectures with multiple sensors and actuators on it. No matter your experience or the robot you are using, Foxglove Studio can be really helpful during your development and testing.
For more info concerning this demo, you can visit directly the official website of Foxglove Studio or get in contact with their official Slack channel. As it is an open-source tool you can also contribute to their GitHub.